publications
publications in reversed chronological order.
2026

2024

2023
-
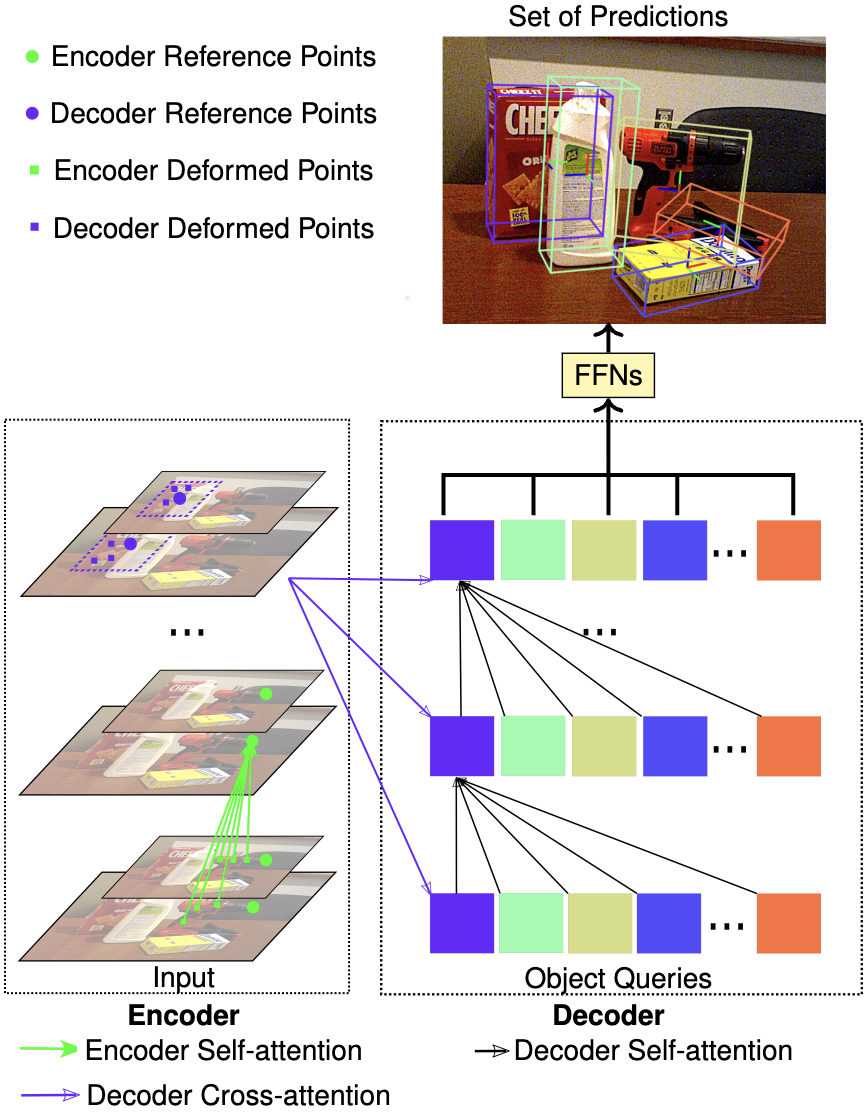 Efficient multi-object pose estimation using multi-resolution deformable attention and query aggregationIn Seventh IEEE International Conference on Robotic Computing (IRC), 2023
Efficient multi-object pose estimation using multi-resolution deformable attention and query aggregationIn Seventh IEEE International Conference on Robotic Computing (IRC), 2023 -
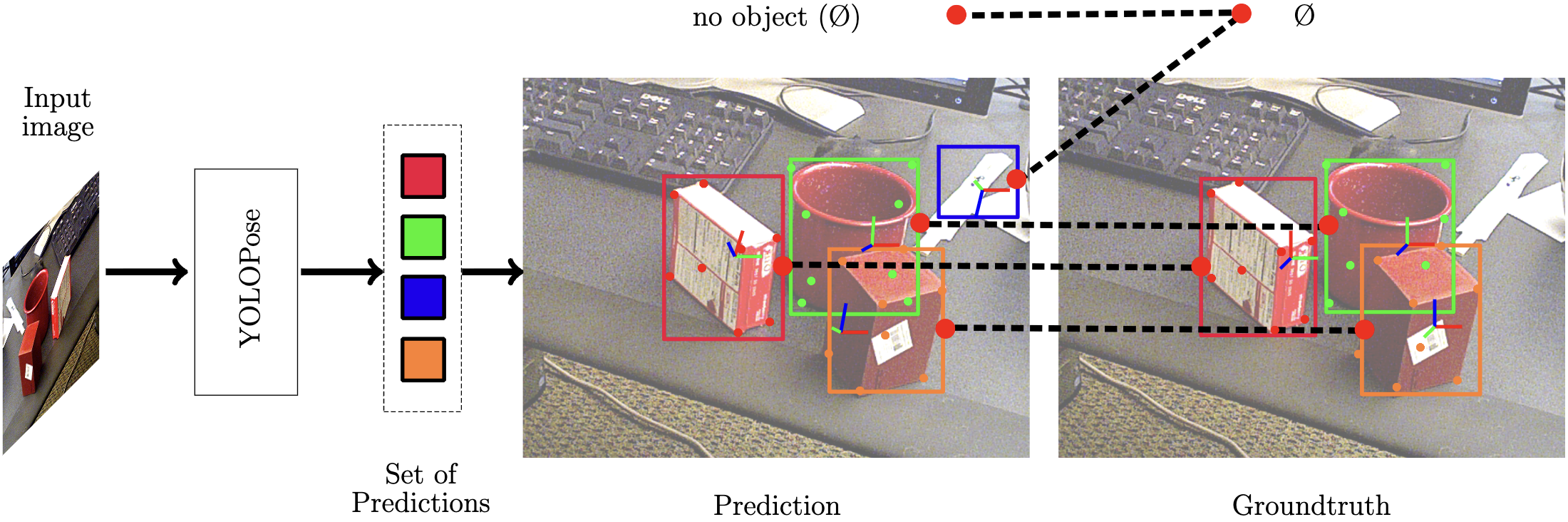 YOLOPose V2: Understanding and improving transformer-based 6D pose estimationRobotics and Autonomous Systems, 2023
YOLOPose V2: Understanding and improving transformer-based 6D pose estimationRobotics and Autonomous Systems, 2023 -
2022
-
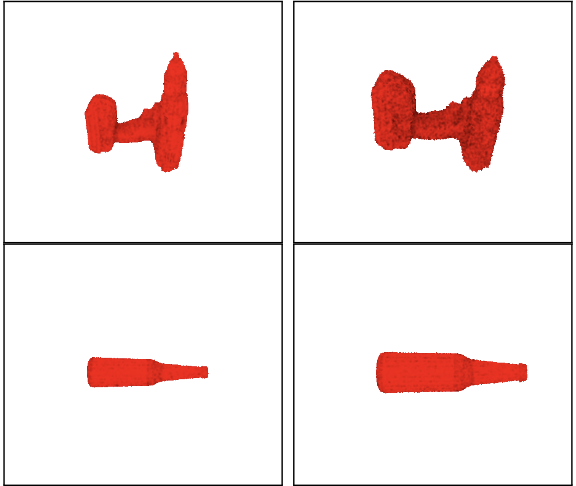
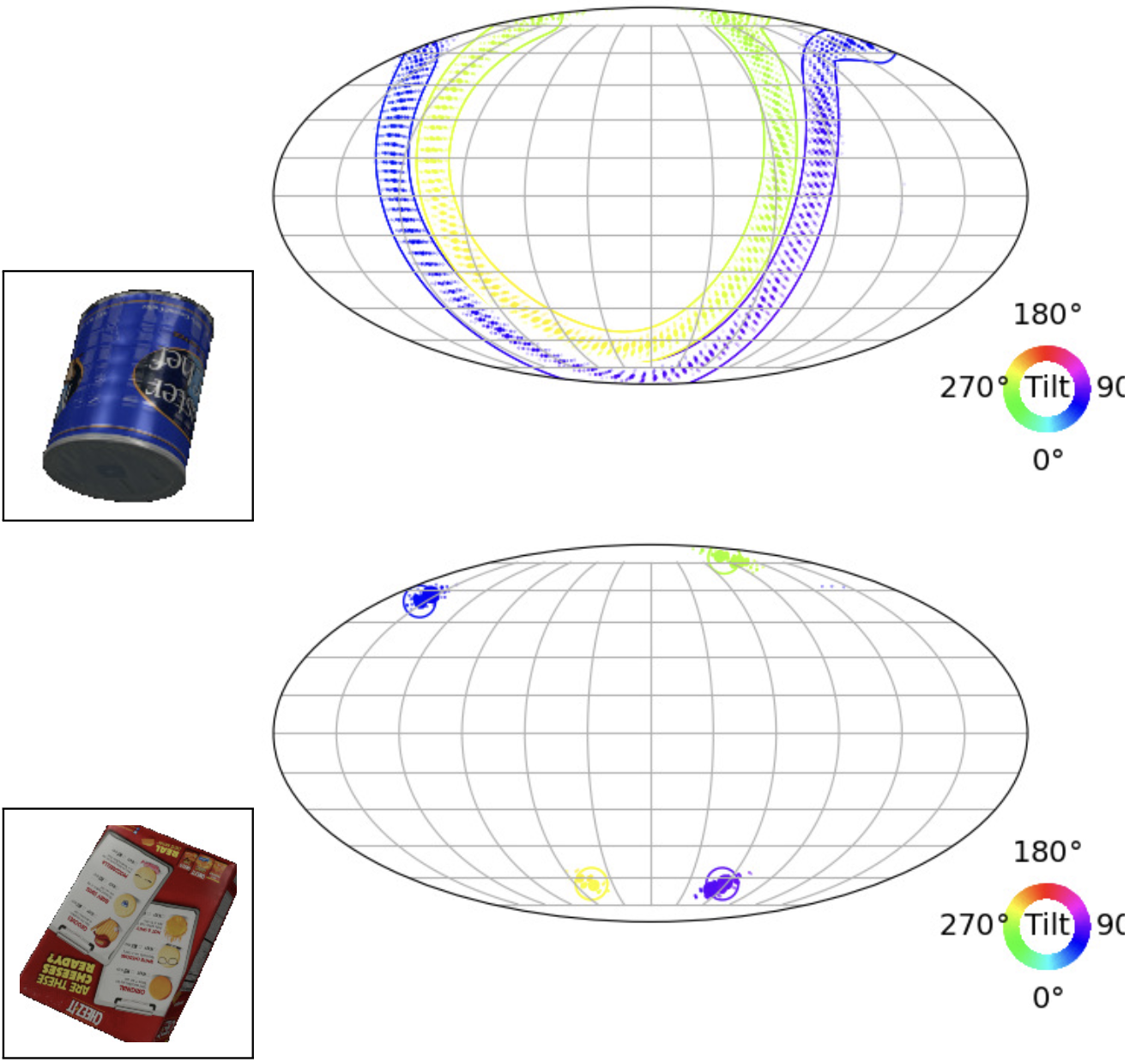 Learning Implicit Probability Distribution Functions for Symmetric Orientation Estimation from RGB Images Without Pose LabelsIn Sixth IEEE International Conference on Robotic Computing (IRC), 2022
Learning Implicit Probability Distribution Functions for Symmetric Orientation Estimation from RGB Images Without Pose LabelsIn Sixth IEEE International Conference on Robotic Computing (IRC), 2022 -
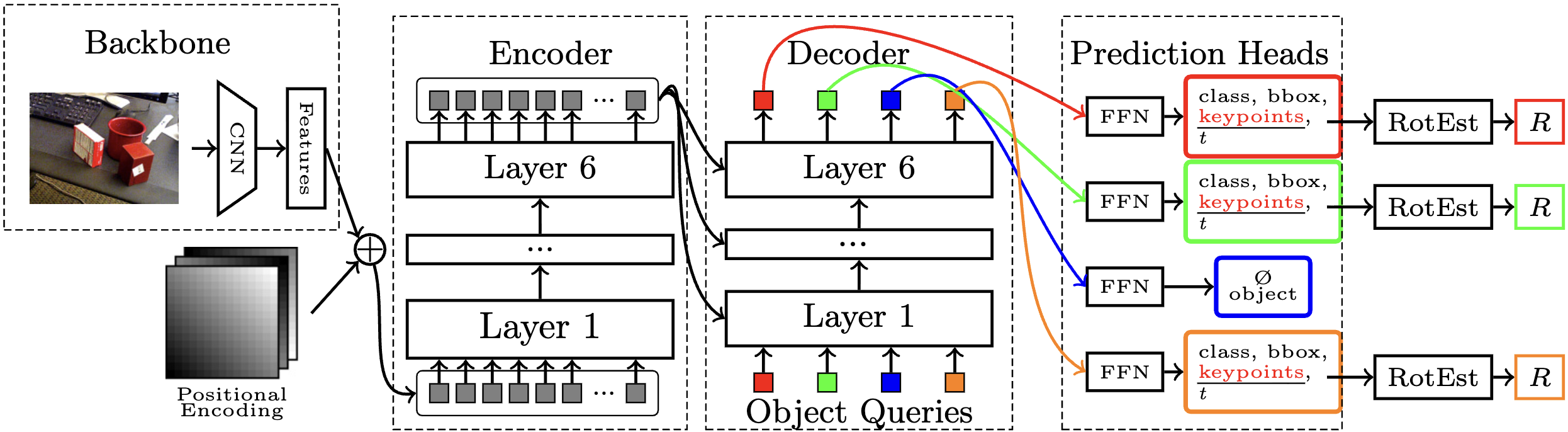 YOLOPose: Transformer-based multi-object 6D pose estimation using keypoint regressionIn International Conference on Intelligent Autonomous Systems, 2022
YOLOPose: Transformer-based multi-object 6D pose estimation using keypoint regressionIn International Conference on Intelligent Autonomous Systems, 2022 -
 ConvPoseCNN2: Prediction and Refinement of Dense 6D Object PosesComputer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP), 2022
ConvPoseCNN2: Prediction and Refinement of Dense 6D Object PosesComputer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP), 2022 -
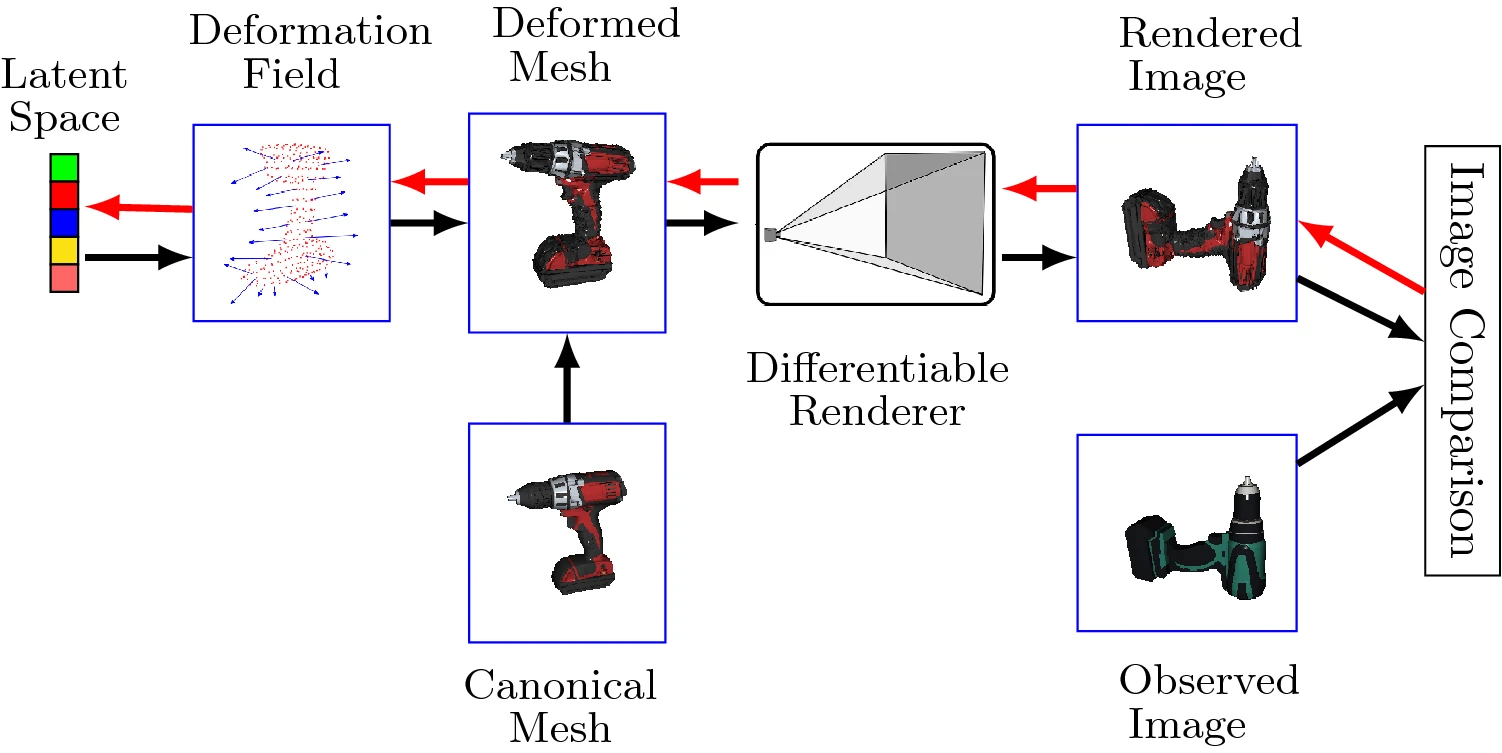
 Iterative 3D Deformable Registration from Single-view RGB Images using Differentiable Rendering.In VISIGRAPP (5: VISAPP), 2022
Iterative 3D Deformable Registration from Single-view RGB Images using Differentiable Rendering.In VISIGRAPP (5: VISAPP), 2022 -
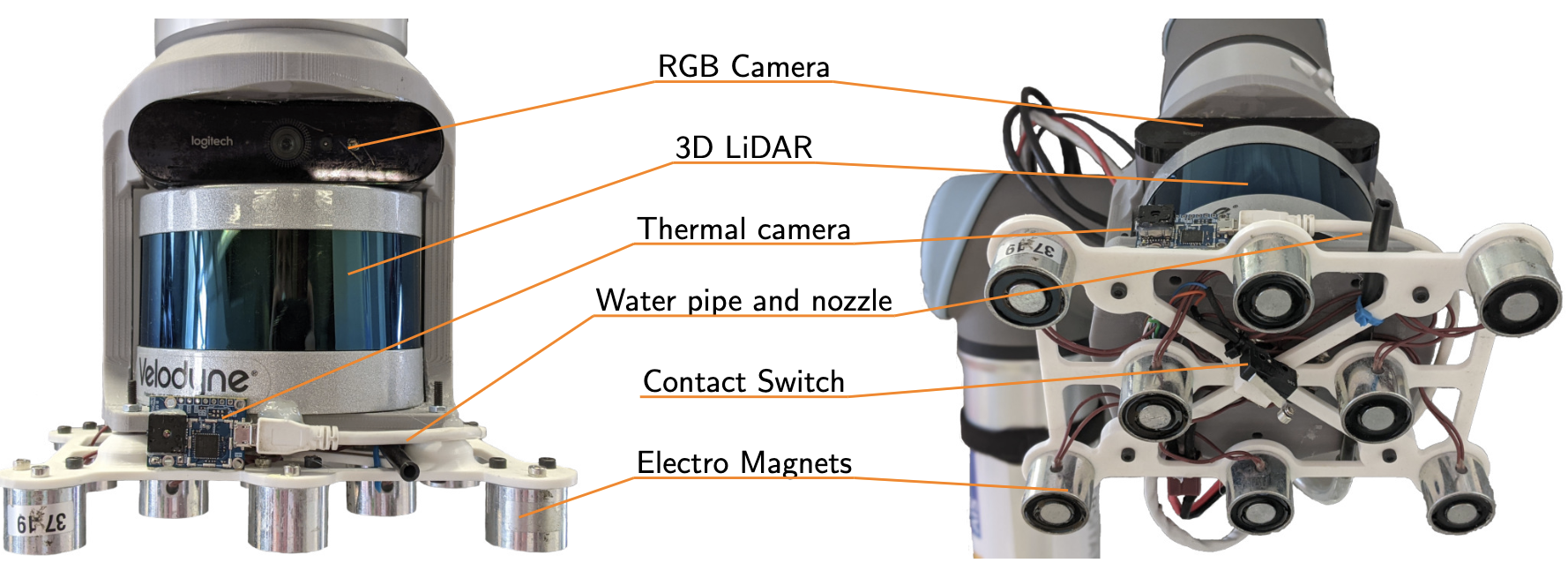 Autonomous Wall-building and Firefighting: Team NimbRo’s UGV Solution for MBZIRC 2020Field Robotics, vol. 2, pp. 55-74, 2022
Autonomous Wall-building and Firefighting: Team NimbRo’s UGV Solution for MBZIRC 2020Field Robotics, vol. 2, pp. 55-74, 2022
2021
-
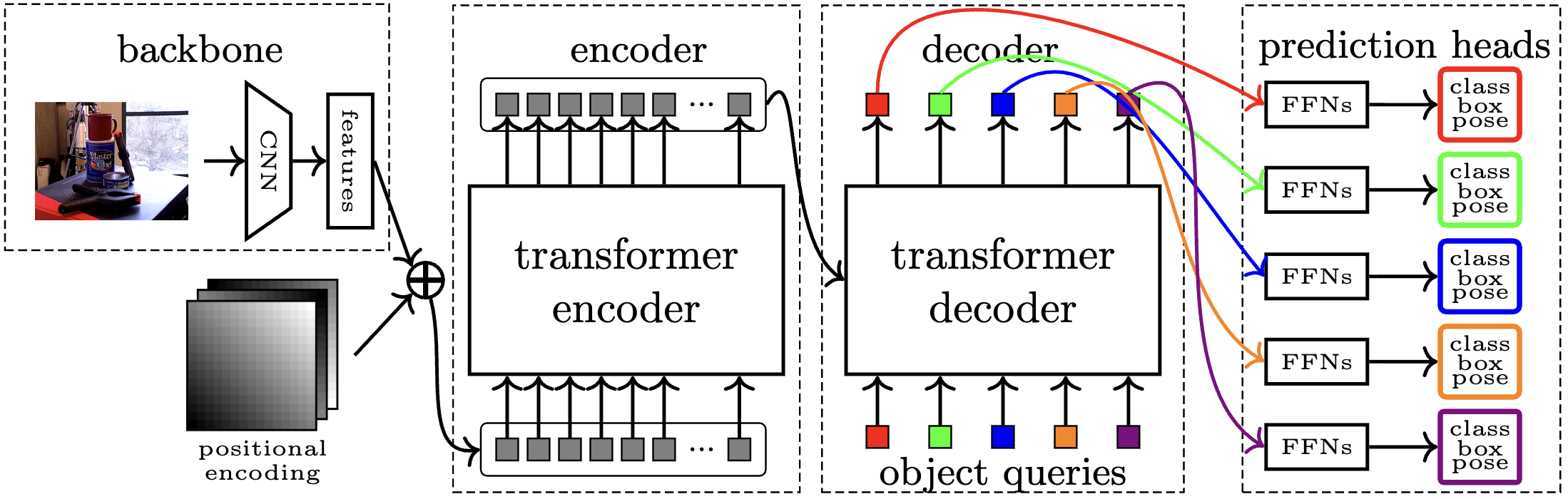 T6D-Direct: Transformers for multi-object 6D pose direct regressionIn DAGM German Conference on Pattern Recognition (GCPR), 2021
T6D-Direct: Transformers for multi-object 6D pose direct regressionIn DAGM German Conference on Pattern Recognition (GCPR), 2021
2020
-
 Autonomous wall building with a UGV-UAV team at MBZIRC 2020In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2020
Autonomous wall building with a UGV-UAV team at MBZIRC 2020In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2020 -
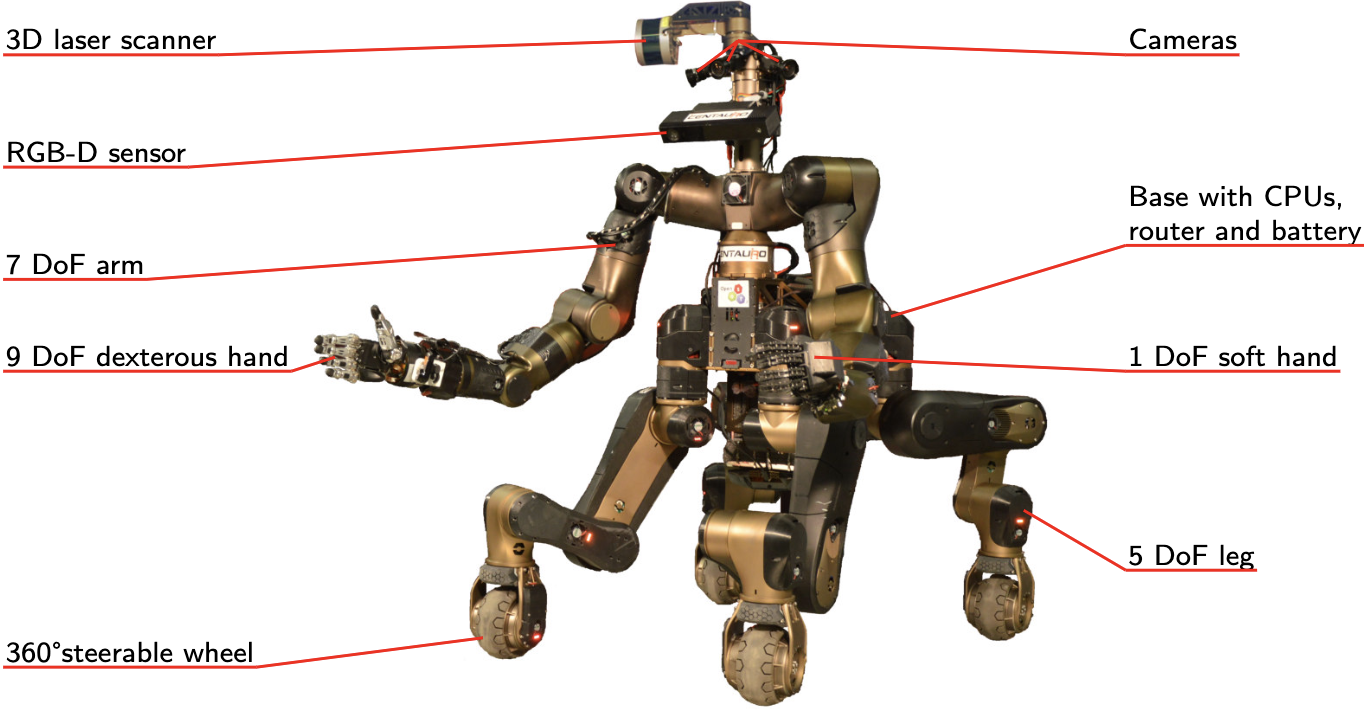 Remote mobile manipulation with the centauro robot: Full-body telepresence and autonomous operator assistanceJournal of Field Robotics, 2020
Remote mobile manipulation with the centauro robot: Full-body telepresence and autonomous operator assistanceJournal of Field Robotics, 2020
2019
-
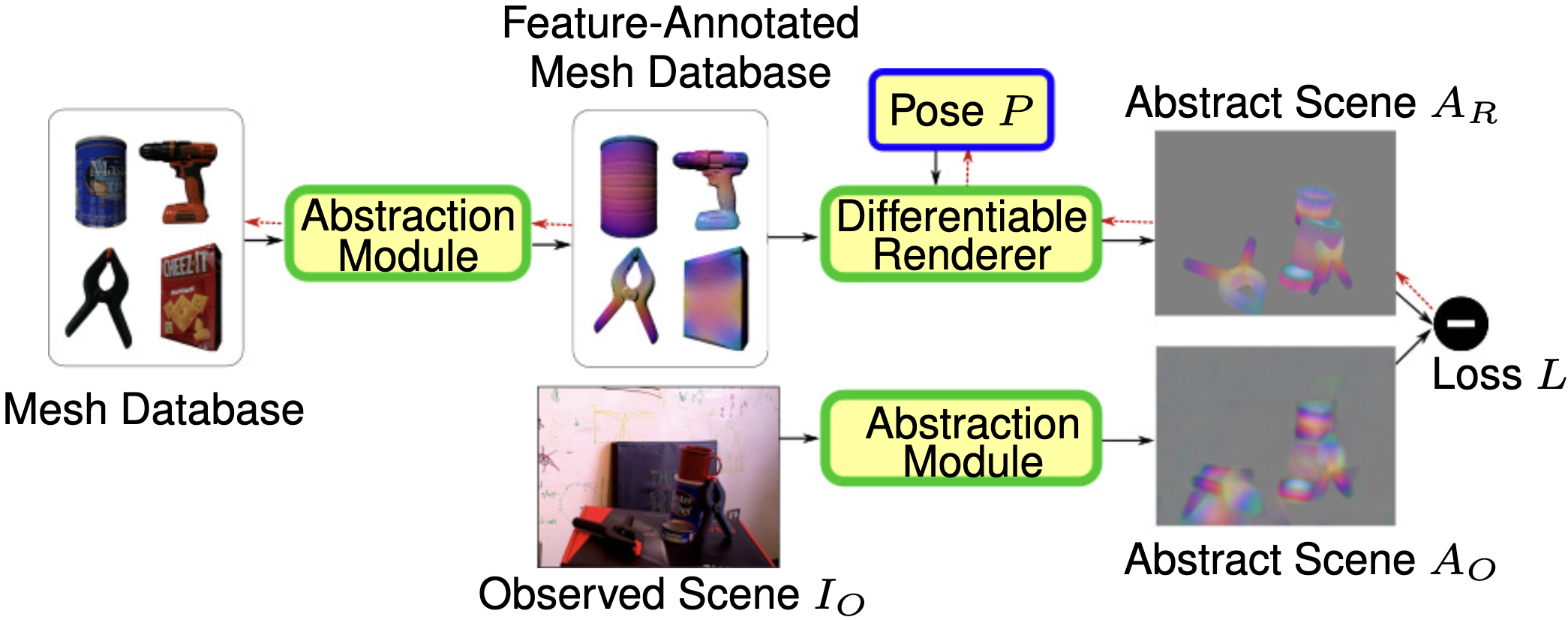 Refining 6D object pose predictions using abstract render-and-compareIn IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), 2019
Refining 6D object pose predictions using abstract render-and-compareIn IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), 2019 -
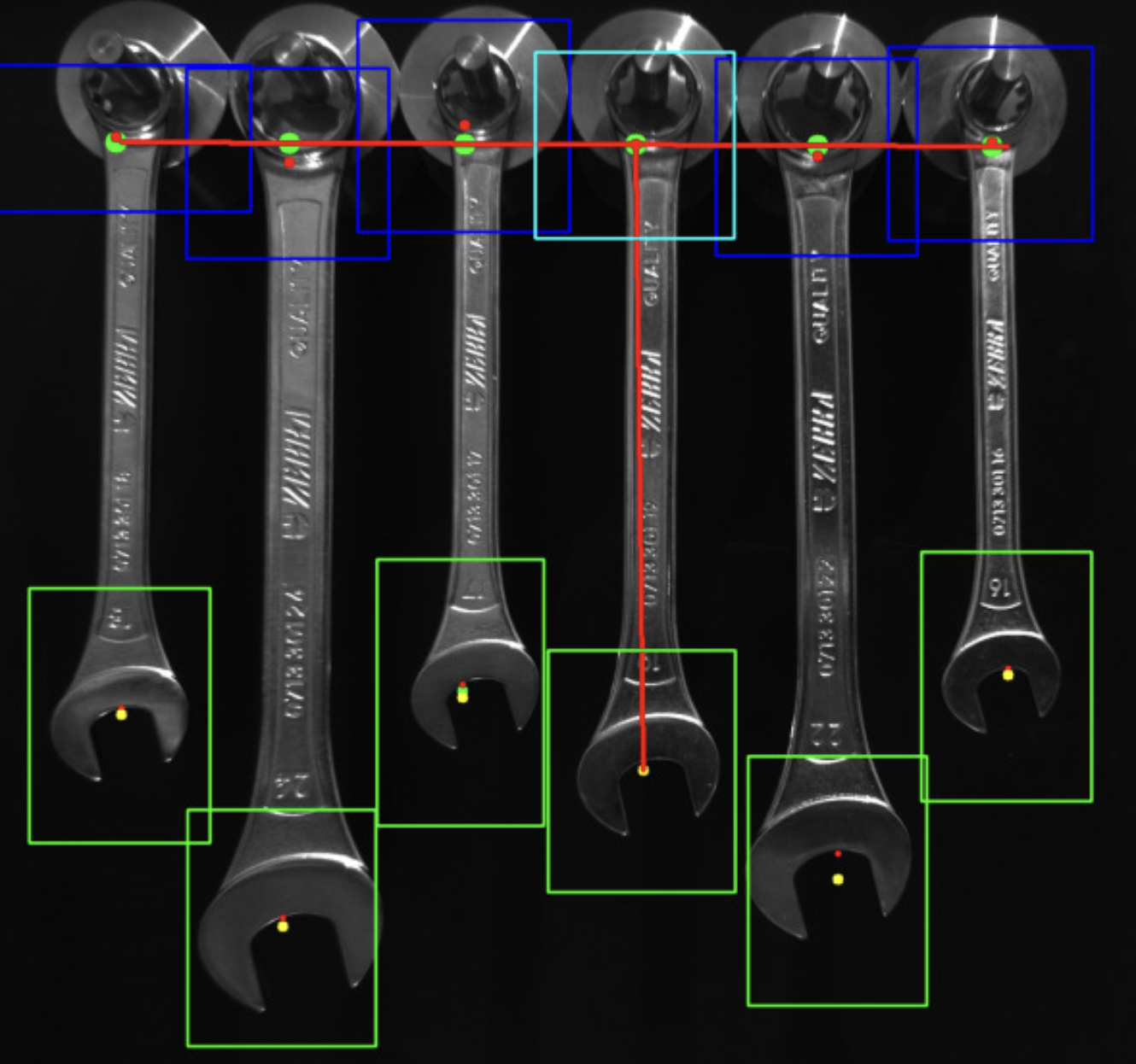 Team NimbRo at MBZIRC 2017: Autonomous valve stem turning using a wrenchJournal of Field Robotics (JFR), 2019
Team NimbRo at MBZIRC 2017: Autonomous valve stem turning using a wrenchJournal of Field Robotics (JFR), 2019
2018
-
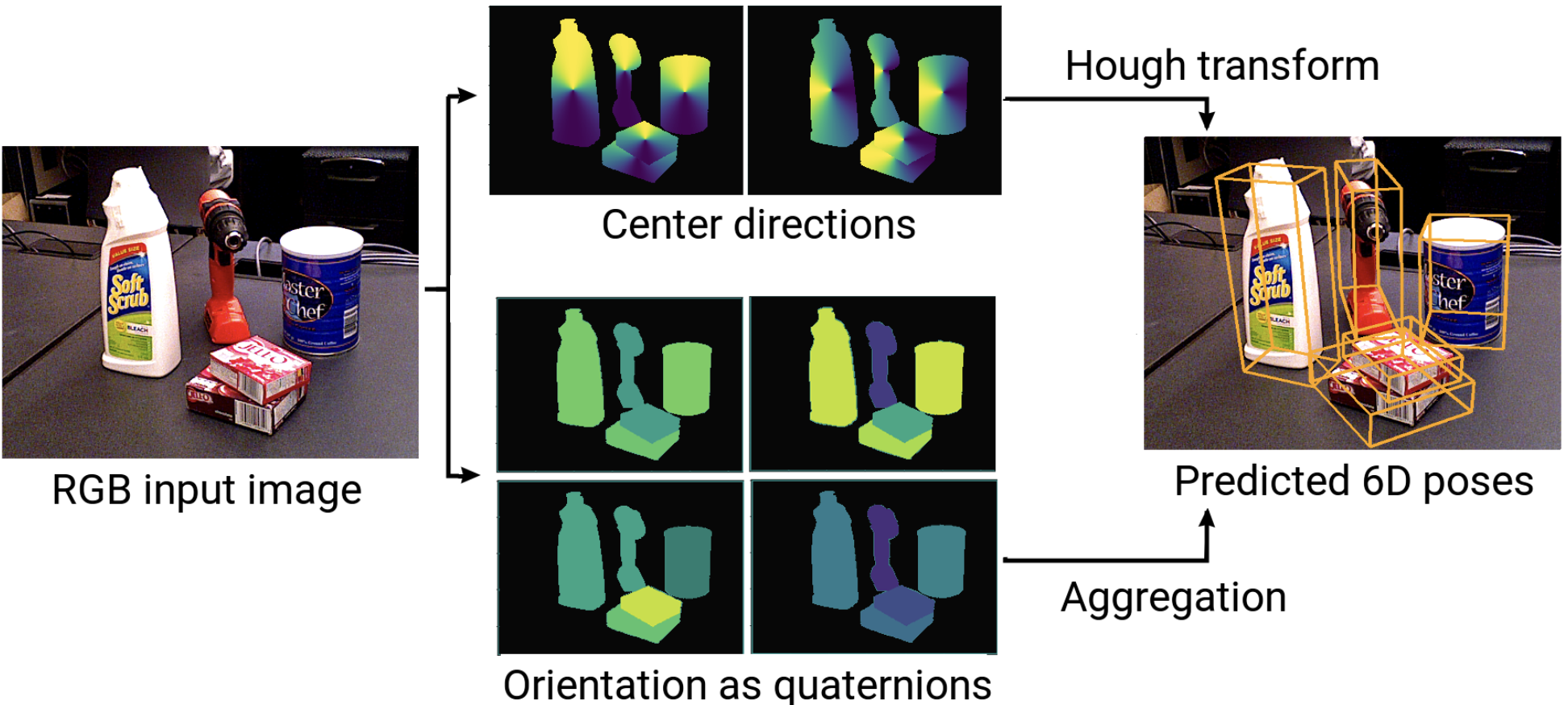
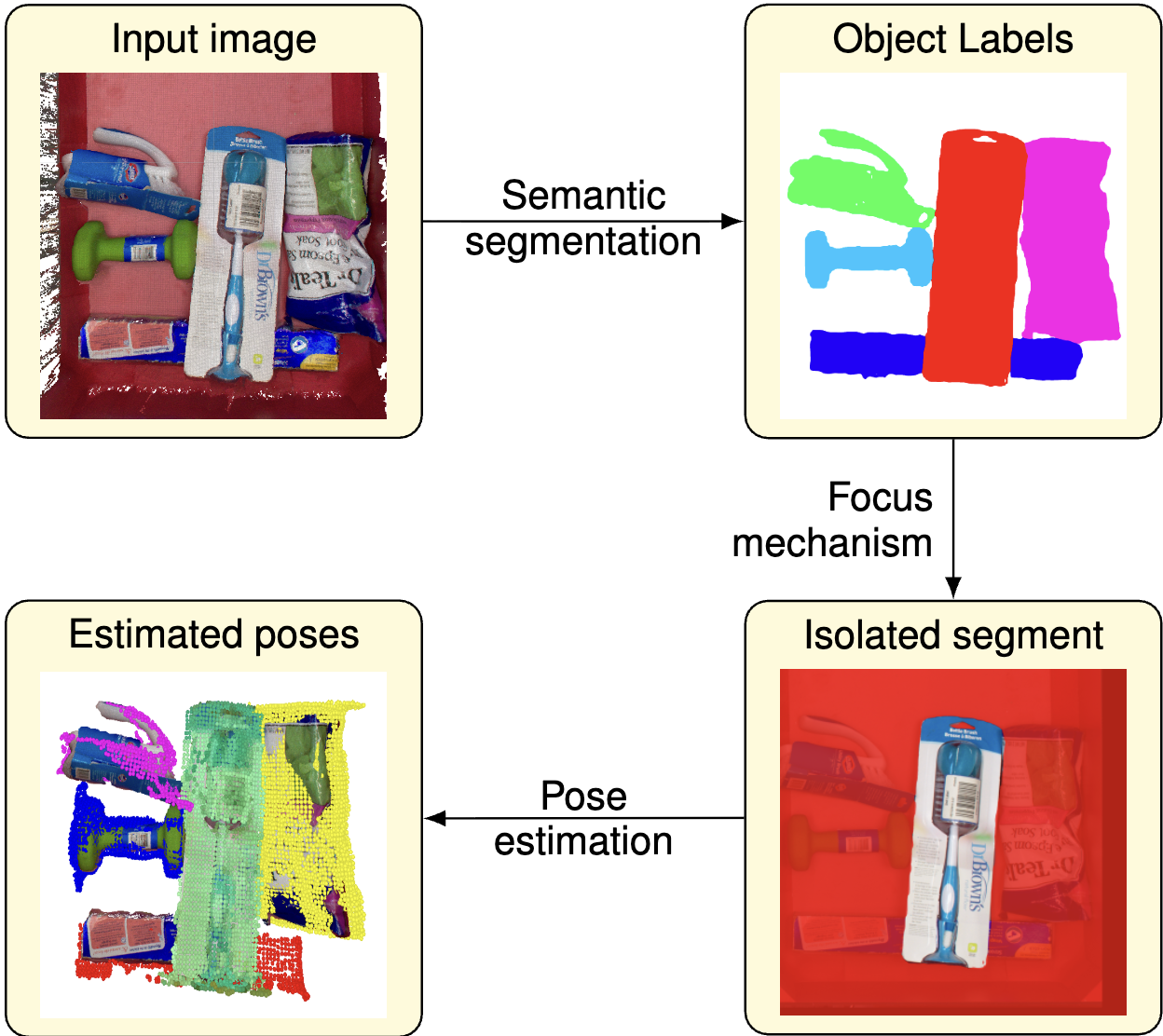 Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networksIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networksIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 -
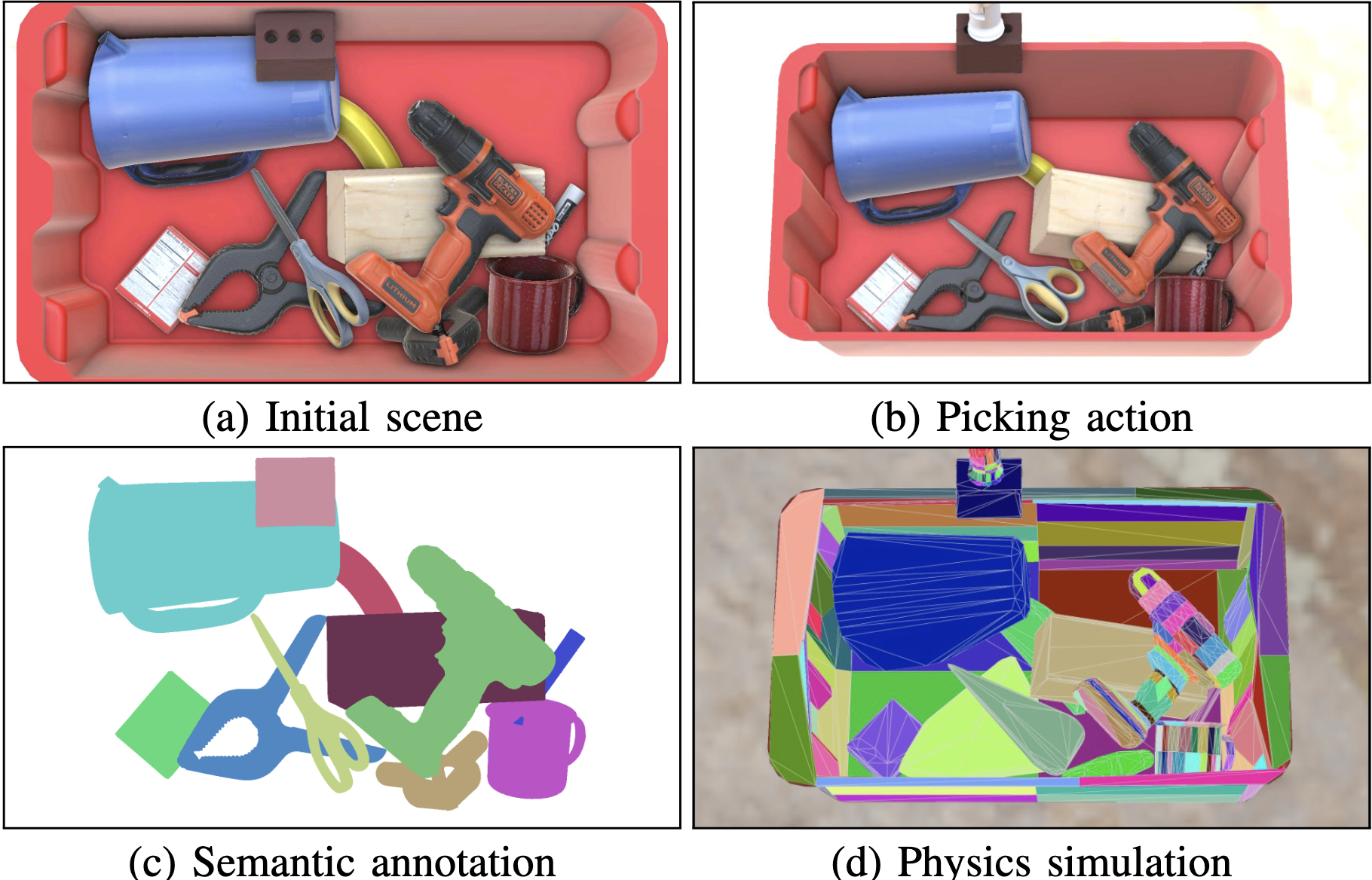
 Fast object learning and dual-arm coordination for cluttered stowing, picking, and packingIn IEEE International Conference on Robotics and Automation (ICRA), 2018
Fast object learning and dual-arm coordination for cluttered stowing, picking, and packingIn IEEE International Conference on Robotics and Automation (ICRA), 2018 -
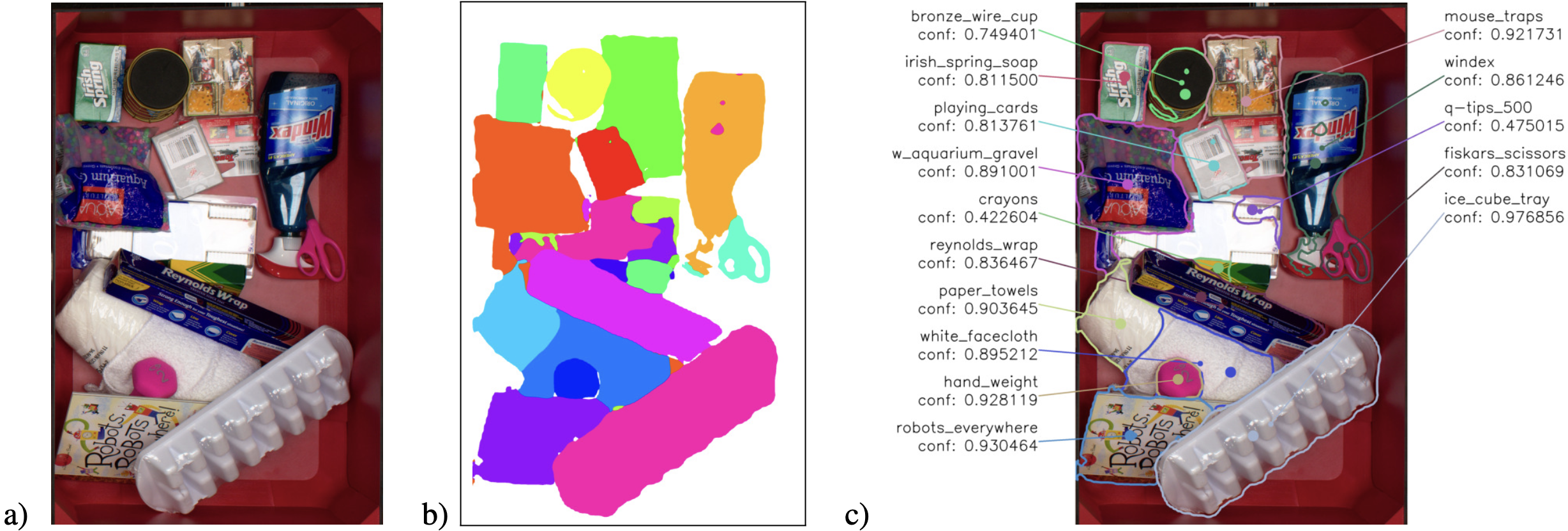
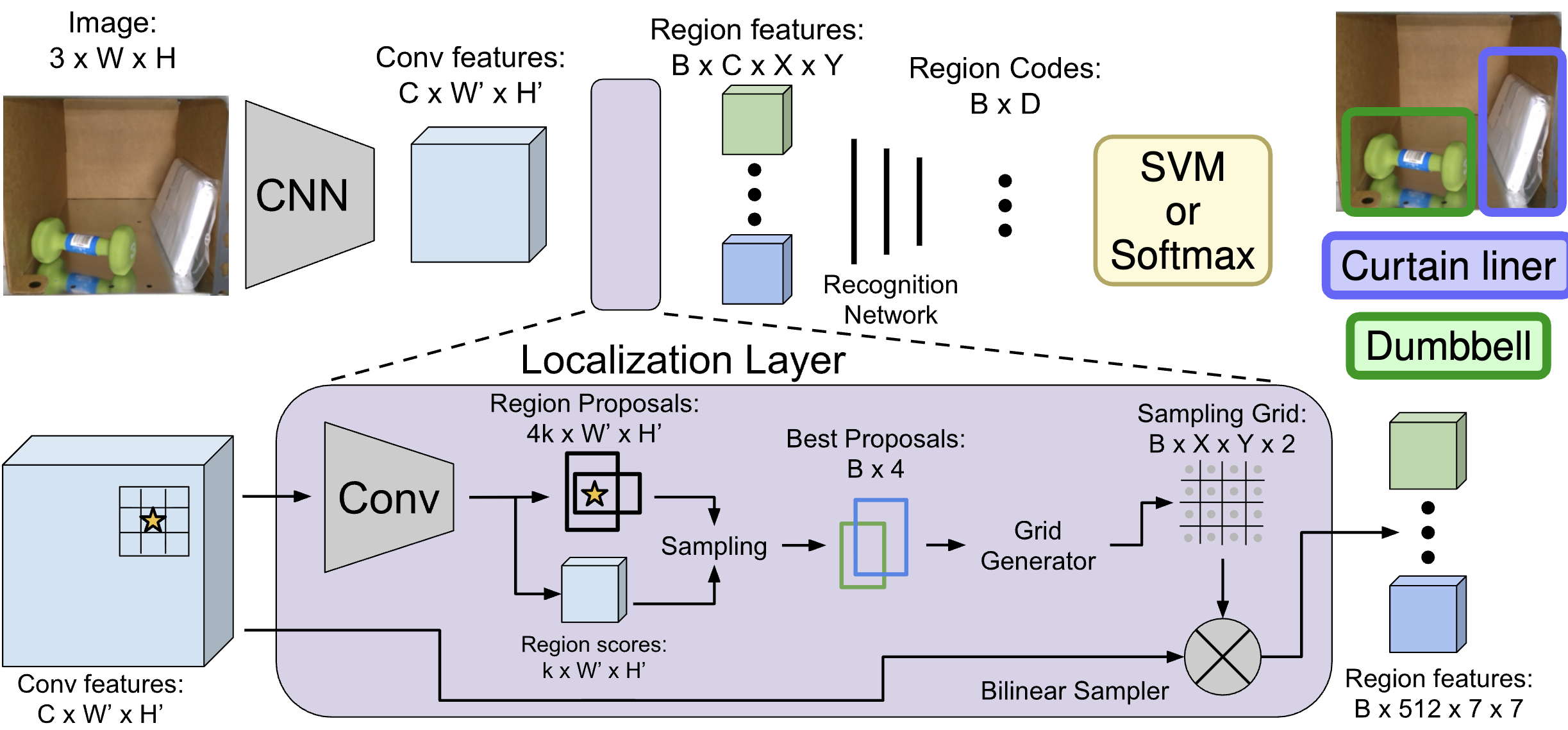 RGB-D object detection and semantic segmentation for autonomous manipulation in clutterThe International Journal of Robotics Research, 2018
RGB-D object detection and semantic segmentation for autonomous manipulation in clutterThe International Journal of Robotics Research, 2018
2017
-
 Nimbro picking: Versatile part handling for warehouse automationIn IEEE International Conference on Robotics and Automation (ICRA), 2017
Nimbro picking: Versatile part handling for warehouse automationIn IEEE International Conference on Robotics and Automation (ICRA), 2017
2016
-
 Supervised autonomy for exploration and mobile manipulation in rough terrain with a centaur-like robotFrontiers in Robotics and AI, 2016
Supervised autonomy for exploration and mobile manipulation in rough terrain with a centaur-like robotFrontiers in Robotics and AI, 2016