Mobile Robotics & UAVs
Team NimbRo @ MBZIRC
I participated in two MBZIRC editions with Team NimbRo, completing various challenges that integrated UAVs, UGVs, and cross-platform collaboration.
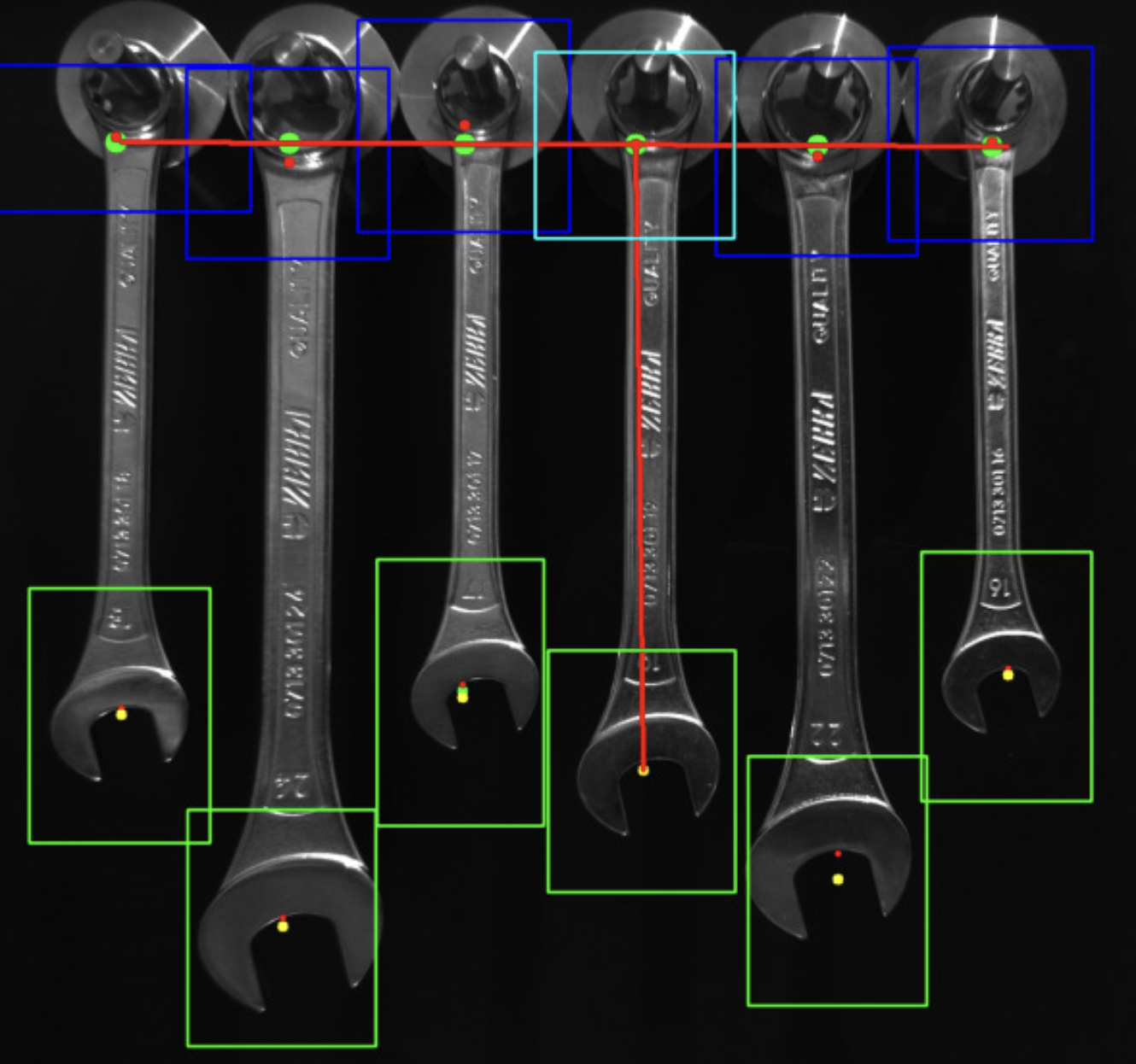
MBZIRC 2017 In the 2017 edition, the UAV’s task was to land on a moving truck and autonomously collect moving objects from the ground. Meanwhile, the UGV had to locate a black box within the arena, approach it, and identify the side featuring hanging wrenches. From several available options, the UGV needed to select the correctly sized wrench to identify a valve, estimate its pose, and rotate it.
I developed a deep learning-based approach to locate specific wrenches and implemented a module for valve pose estimation using a short-range pmd CamBoard pico flexx depth camera; these contributions are detailed in the following article:” (Schwarz et al., 2019)



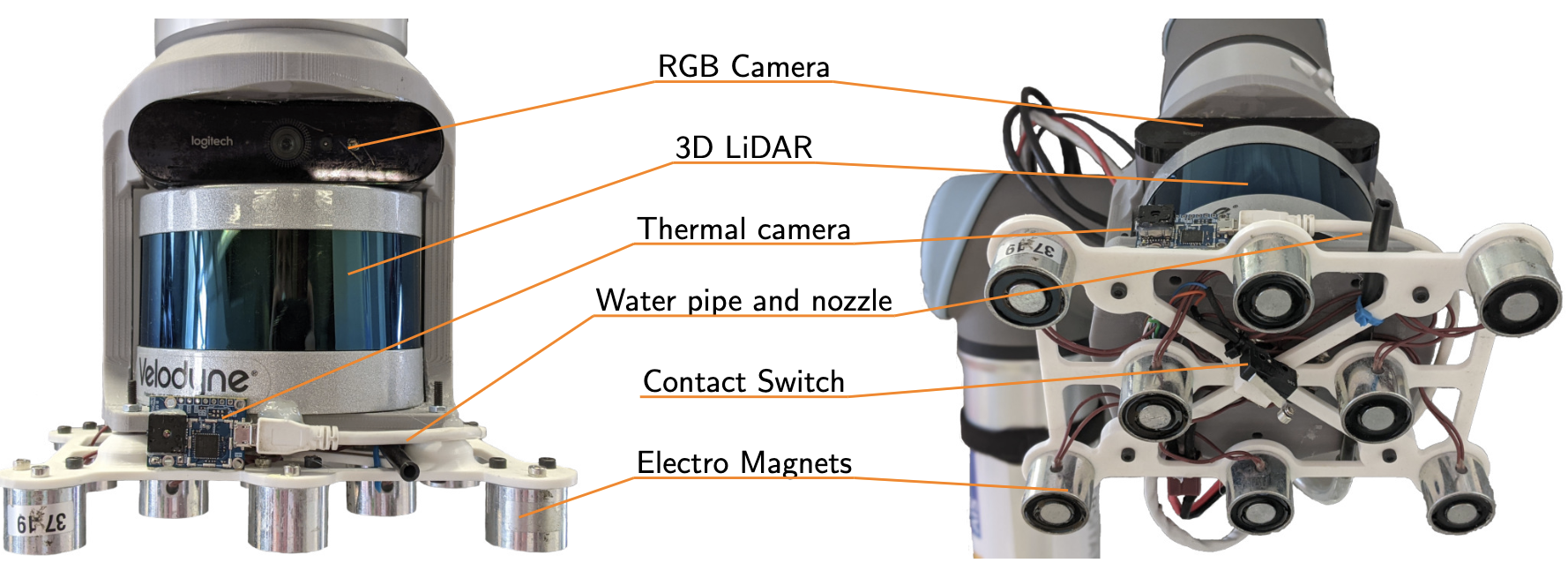
MBZIRC 2020 The 2020 edition focused on autonomous firefighting, where I contributed to both UAV and UGV development. I designed an object detection module for the UAV, optimizing it for energy-efficient execution on an on-board Google Edge TPU. For the UGV, I implemented object detection and 3D model registration using laser point clouds. These contributions are detailed in the following papers: (Lenz et al., 2020) and (Lenz et al., 2022)


References
2022
-
 Autonomous Wall-building and Firefighting: Team NimbRo’s UGV Solution for MBZIRC 2020Field Robotics, vol. 2, pp. 55-74, 2022
Autonomous Wall-building and Firefighting: Team NimbRo’s UGV Solution for MBZIRC 2020Field Robotics, vol. 2, pp. 55-74, 2022
2020
-
 Autonomous wall building with a UGV-UAV team at MBZIRC 2020In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2020
Autonomous wall building with a UGV-UAV team at MBZIRC 2020In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2020
2019
-
 Team NimbRo at MBZIRC 2017: Autonomous valve stem turning using a wrenchJournal of Field Robotics (JFR), 2019
Team NimbRo at MBZIRC 2017: Autonomous valve stem turning using a wrenchJournal of Field Robotics (JFR), 2019