Participating in the Amazon Robotics Challenge (ARC) was pivotal in understanding the complexities of large-scale bin-picking perception systems. During the inaugural 2016 edition, I developed my first deep-learning-based perception system and was impressed by the efficiency of transfer learning. Despite our small team size, we built a robust object detection module using only a few manually annotated images. The 2017 challenge significantly increased in difficulty; unlike the previous year, teams were given new objects just 45 minutes before the start, requiring highly adaptable perception pipelines. Our team performed exceptionally well, earning second place, and the lessons learned fundamentally shaped my Ph.D. research. The following article describe our ARC robotic systems: (Schwarz et al., 2017), (Schwarz et al., 2018), (Schwarz et al., 2018), and (Periyasamy et al., 2018)
ARC 2016 robotic setup.
Semantic segmetation model developed for ARC 2016. a) RGB input. b) Semantic segmentation result. c) Object contours generated.
References
2018
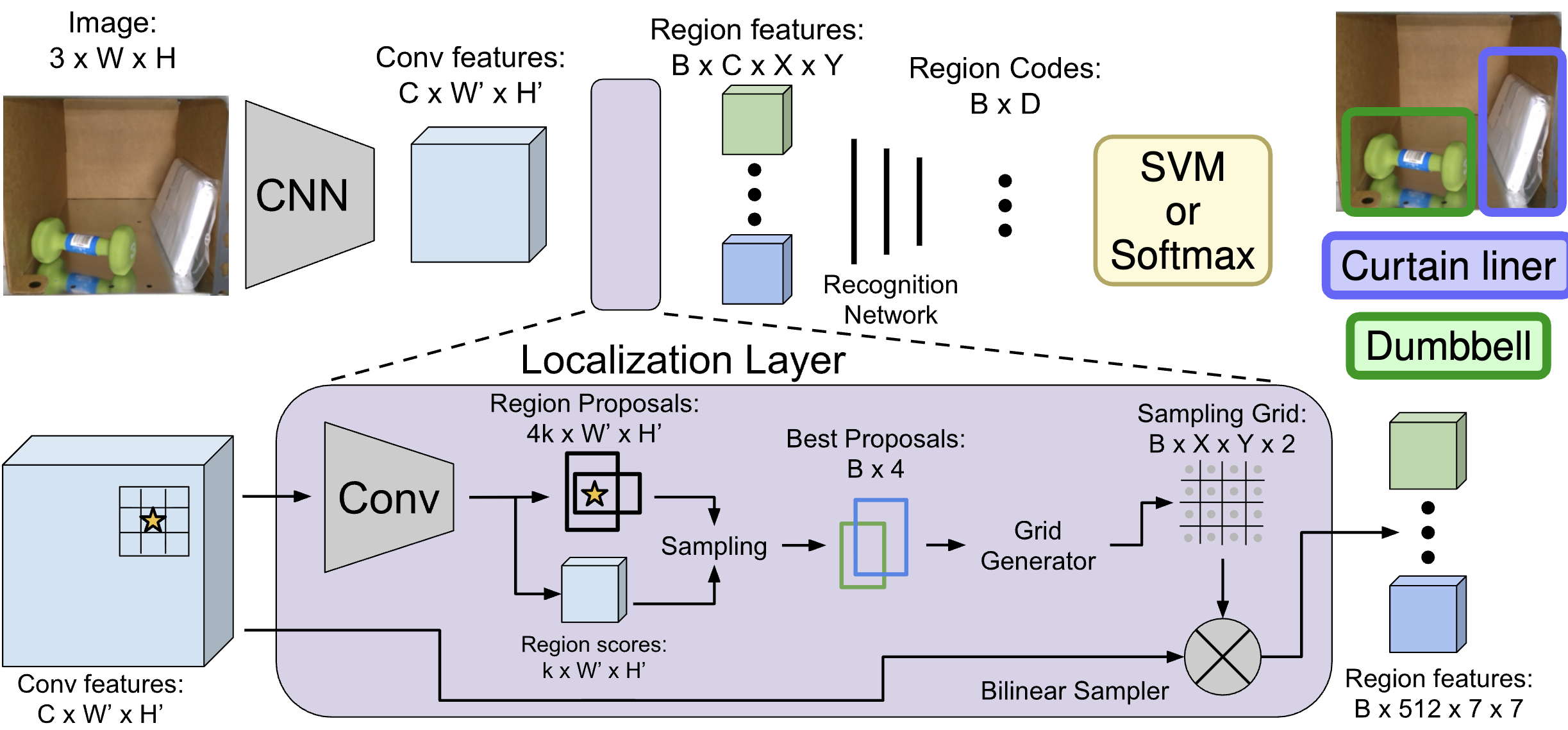
RGB-D object detection and semantic segmentation for autonomous manipulation in clutter
Max Schwarz, Anton Milan, Arul Selvam Periyasamy, and 1 more author
The International Journal of Robotics Research, 2018
@article{schwarz2018rgb,title={RGB-D object detection and semantic segmentation for autonomous manipulation in clutter},author={Schwarz, Max and Milan, Anton and Periyasamy, Arul Selvam and Behnke, Sven},journal={The International Journal of Robotics Research},volume={37},number={4-5},pages={437--451},year={2018},publisher={SAGE Publications Sage UK: London, England},}
Fast object learning and dual-arm coordination for cluttered stowing, picking, and packing
Max Schwarz, Christian Lenz, Germán Martı́n Garcı́a, and 4 more authors
In IEEE International Conference on Robotics and Automation (ICRA), 2018
@inproceedings{schwarz2018fast,title={Fast object learning and dual-arm coordination for cluttered stowing, picking, and packing},author={Schwarz, Max and Lenz, Christian and Garc{\'\i}a, Germ{\'a}n Mart{\'\i}n and Koo, Seongyong and Periyasamy, Arul Selvam and Schreiber, Michael and Behnke, Sven},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},pages={3347--3354},year={2018},}
Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networks
Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
@inproceedings{periyasamy2018robust,title={Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networks},author={Periyasamy, Arul Selvam and Schwarz, Max and Behnke, Sven},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},pages={6660--6666},year={2018},}
2017
Nimbro picking: Versatile part handling for warehouse automation
Max Schwarz, Anton Milan, Arul Selvam Periyasamy, and 5 more authors
In IEEE International Conference on Robotics and Automation (ICRA), 2017
@inproceedings{schwarz2017nimbro,title={Nimbro picking: Versatile part handling for warehouse automation},author={Schwarz, Max and Milan, Anton and Periyasamy, Arul Selvam and Lenz, Christian and Munoz, Aura and Schreiber, Michael and Sch{\"u}ller, Sebastian and Behnke, Sven},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},pages={3032--3039},year={2017},organization={IEEE},}


 RGB-D object detection and semantic segmentation for autonomous manipulation in clutterThe International Journal of Robotics Research, 2018
RGB-D object detection and semantic segmentation for autonomous manipulation in clutterThe International Journal of Robotics Research, 2018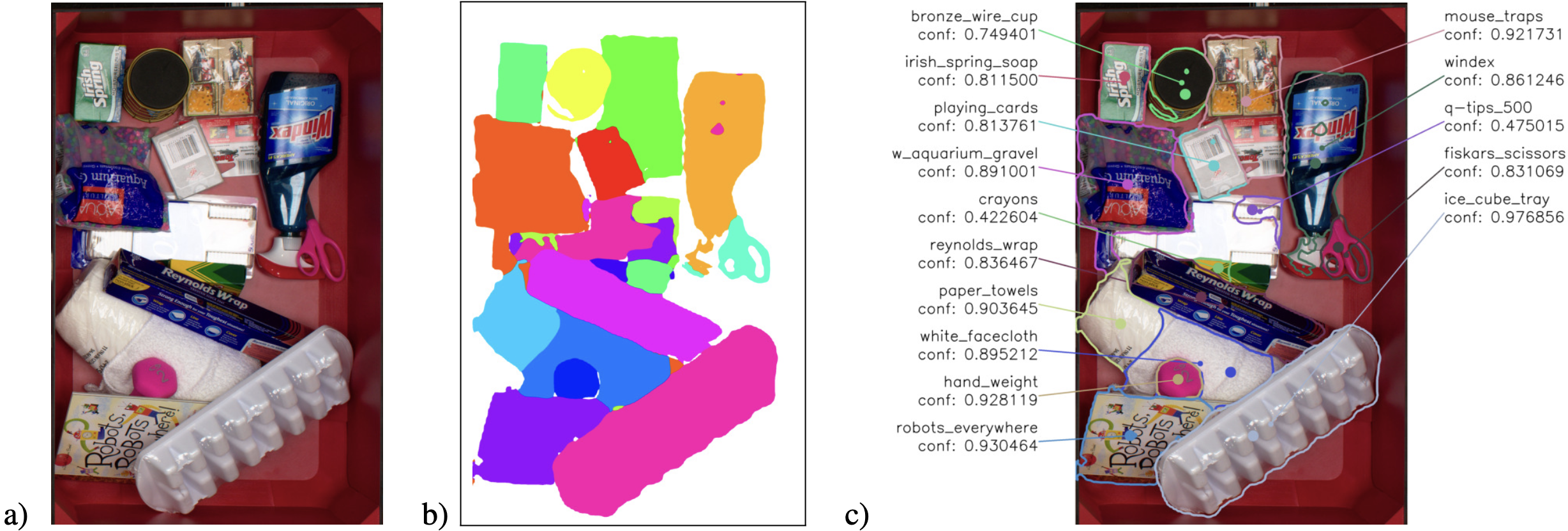 Fast object learning and dual-arm coordination for cluttered stowing, picking, and packingIn IEEE International Conference on Robotics and Automation (ICRA), 2018
Fast object learning and dual-arm coordination for cluttered stowing, picking, and packingIn IEEE International Conference on Robotics and Automation (ICRA), 2018 Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networksIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
Robust 6D object pose estimation in cluttered scenes using semantic segmentation and pose regression networksIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 Nimbro picking: Versatile part handling for warehouse automationIn IEEE International Conference on Robotics and Automation (ICRA), 2017
Nimbro picking: Versatile part handling for warehouse automationIn IEEE International Conference on Robotics and Automation (ICRA), 2017